Robótica: desarrollo tecnológico para explorar el fondo marino
Un robot submarino explorará los recursos pelágicos y bentónicos en la columna de agua y el fondo marino peruano para mejorar la producción de las empresas pesqueras y de los pescadores artesanales.
Créditos y Fecha de Publicación
Publicado el
¿Cómo impacta la explotación de recursos pelágicos y bentónicos en la columna de agua y el fondo marino peruano? Ahora podremos saberlo con el sistema robótico (ROV) avanzado de monitoreo de grandes profundidades, un proyecto financiado por el PNIPA, y ejecutado por la PUCP y Tumi Robotics.
Un antes y un después
La ausencia de este sistema —a causa de la escasez de herramientas avanzadas para la inspección submarina, los deficientes métodos de evaluación y monitoreo tradicionales, y la limitación de recursos humanos para un monitoreo frecuente y en aguas intermedias— ha limitado el trabajo de monitoreo para evitar serios problemas de sobreexplotación de especies pelágicas y bentónicas, así como la degradación del ecosistema marino y una deficiente gestión en el uso de recursos marinos, que, a su vez, ha provocado un estancamiento de la economía pesquera.
El magíster Diego Arce, docente del Departamento Académico de Ingeniería, señala que, a fin de revertir esta situación, se desarrolló un robot submarino instrumentado con un sistema de visión y un sistema de sensores para la exploración de los recursos pelágicos y bentónicos. Este, además, cuenta con la capacidad para ser utilizado y ofrecer servicios al sector pesquero (entidades/empresas) y proveer información a pescadores artesanales.
Esto significa que el sistema podrá ser utilizado para el monitoreo en tiempo real del fondo marino desde una plataforma o embarcación. La propuesta de valor consiste en ofrecer los siguientes servicios personalizados: 1) alquiler del ROV a empresas del sector, 2) salidas frecuentes al mar con los equipos y análisis de información obtenida en campo, 3) brindar información gratuita de parámetros de temperatura a pescadores artesanales.

Desde el aspecto institucional, se logró un mayor vínculo entre las entidades que conforman la alianza estratégica. Desde el aspecto académico, se logró desarrollar una nueva tecnología que podrá ser patentada por la PUCP».
Investigación preliminar
Como parte del proceso de investigación, se identificaron diferentes tecnologías utilizadas en el ámbito internacional para este tipo de monitoreo. Bajo esa premisa, se determinó que el producto más usado son los ROV, debido a su capacidad de sumergirse a grandes profundidades, y a la posibilidad de ser equipados con sondas para monitorear parámetros del mar y sistemas de visión para inspección visual.
Otra opción muy similar son los UAV (vehículo submarino no tripulado), utilizados para caracterizar la columna de agua, pero su maniobrabilidad y diseño son más complejos. Una alternativa más simple es la exploración de zonas submarinas mediante la inspección con sistemas de visión, equipados con buzos, con la finalidad de recabar información que luego es procesada para determinar el estado de los recursos. En el ámbito nacional, Imarpe utiliza tecnología hidroacústica, es decir, usa ecosondas instaladas en barcos de exploración para determinar los recursos bentónicos.
Luego de esta revisión y evaluación, se optó por el ROV. Diego Arce sostiene que esta tecnología brinda una nueva herramienta para el sector pesquero, «porque permite caracterizar e identificar los recursos marinos presentes en sectores específicos del mar peruano. De esta manera, se puede mejorar la producción de empresas pesqueras o de los mismos pescadores artesanales conociendo el estado del mar, y la presencia de recurso pelágicos y bentónicos».
¿Cómo funciona el submarino?
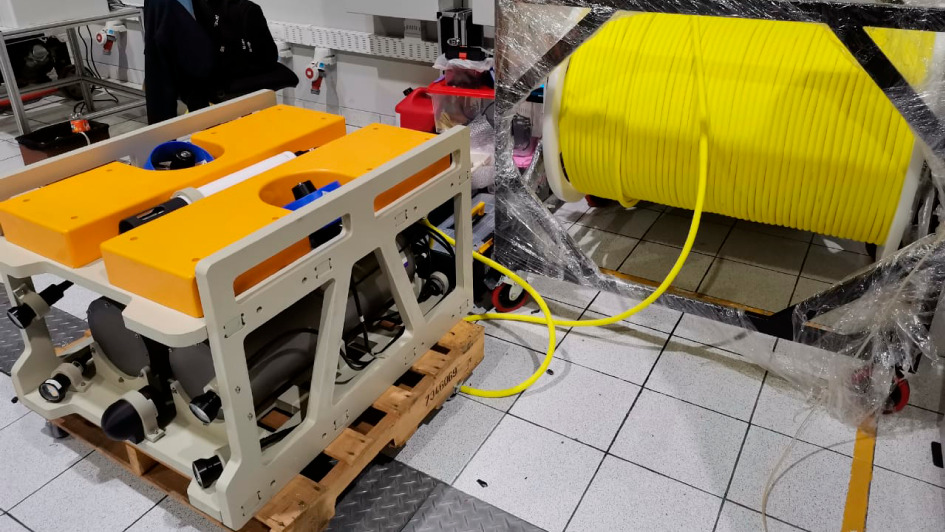
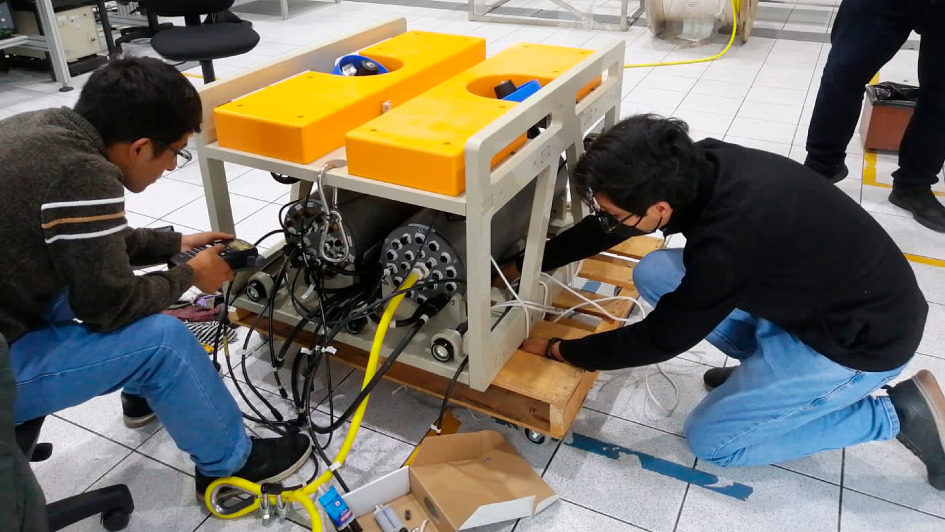
La solución óptima es el desarrollo de un sistema robótico ROV avanzado para el monitoreo a profundidades mayores a los 500 metros (hasta los 1,000 metros). Este sistema robótico está compuesto por los siguientes elementos:
- Un ROV diseñado con materiales y componentes para operar a grandes profundidades (superior a 500 m a inferior a 1,000 m) y equipado con un sistema de monitoreo basado en visión por computadora, sondas multiparámetros para la medición de características del agua (temperatura, salinidad, oxígeno, presión, pH, turbidez, clorofila), brazo hidráulico para toma de muestras (fitoplacton, zooplacton, bacterioplacton, ictioplacton, macrozoobentos) y registro hidroacústico de organismos marinos
- Una grúa de fácil portabilidad para el despliegue y la extracción del ROV en la plataforma de diferentes embarcaciones
- Una estación de energía y teleoperación por computadora
- Una plataforma de software gráfica (GUI) para control, navegación, supervisión, monitoreo y almacenamiento de información (video y datos)
- Una metodología para la evaluación de recursos pelágicos y bentónicos en la columna y en el fondo marino
- Algoritmos para el procesamiento de imágenes y la detección de recursos marinos
Gracias a este proyecto, se impactará de forma positiva en cuatro ámbitos claves: en el ámbito económico, generará mayor estimulación y rentabilidad de la pesca sostenible de recursos marinos; en el ámbito social, aumentará el empleo directo en el sector; en el ámbito ambiental, fomentará la conservación y recuperación de los recursos marinos y sus ecosistemas; en el ámbito tecnológico, impulsará un desarrollo local de tecnologías submarinas y métodos de evaluación avanzados.
Academia, Estado y empresa
Diego Arce asegura que el trabajo conjunto entre academia, Estado y empresa privada brinda beneficios institucionales, académicos y económicos. «Desde el aspecto institucional, se logró un mayor vínculo entre las entidades que conforman la alianza estratégica. Desde el aspecto académico, se logró desarrollar una nueva tecnología que podrá ser patentada por la PUCP. También se realizaron publicaciones en conferencias internacionales y en revistas científicas. Desde el aspecto económico/empresarial, el desarrollo tecnológico formará parte de la cartera de servicios de Tumi Robotics para la inspección y la caracterización de entornos submarinos a altas profundidades», afirma.


