Investigadores PUCP realizan innovaciones en dispositivos de rehabilitación corporal
Desde la Universidad se promueve el desarrollo de iniciativas tecnológicas con impacto social. Las especializaciones en ingeniería biomédica y mecánica brindan un gran aporte en la creación de nuevos dispositivos en el área de rehabilitación de miembros corporales. Los profesores Dante Elías y Victoria Abarca nos comentan al respecto.


La tecnología social es uno de nuestros principales aliados a nivel global para cumplir, al 2030, con los 17 objetivos de desarrollo sostenible (ODS) que aprobó la Organización de las Naciones Unidas (ONU) en el 2015. Actualmente, desde la academia, se generan espacios de investigación para lograr el tercer ODS, referido a garantizar una vida sana y promover el bienestar en todas las edades.
Inicio de la especialización: biomecánica robótica
Desde el año 2006, en la PUCP, se promueve la gestión de proyectos de iniciativas tecnológicas para resolver problemas de impacto social. «Empezamos con fondos internos desde la Universidad, con una línea de investigación pionera en ese momento, referida a la biomecánica robótica y análisis de movimiento, con énfasis en salud y deporte», nos comenta el Dr. Dante Elías.
A partir de la visión de las autoridades universitarias de ese entonces, se apostó por una gran inversión a corto plazo, pero que vería los resultados a futuro. «En el año 2008 participamos en dos grandes proyectos: el Concurso Lucet, otorgado por el Rectorado PUCP para desarrollar investigación en Ingeniería. Y, por otro lado, el proyecto con Fondecyt, apoyados desde el Estado y la Dirección de Investigación Académica (DIA-PUCP) de esa época», precisa el Dr. Elías.

Empezamos con fondos internos desde la Universidad, con una línea de investigación pionera en ese momento, referida a la biomecánica robótica y análisis de movimiento, con énfasis en salud y deporte".
Dr. Dante Elías
Director de la carrera de Ingeniería Biomédica PUCP
El impulso inicial con estos financiamientos internos y externos creó el marco propicio para que se puedan gestar nuevas ideas y proyectos. «Gracias a los fondos se pudo invertir en infraestructura, equipamiento y capacidades formadoras de recursos humanos», acota Elías. De esta manera, se forma el Grupo de Investigación de Robótica Aplicada y Biomecánica (GIRAB-PUCP), que a su vez gestiona la creación del Laboratorio de Investigación en Robótica Aplicada y Biomecánica (LIBRA-PUCP).
Interés internacional por la investigación PUCP
Las especializaciones en Ingeniería Mecánica y Biomédica son recientes en el ámbito regional. Victoria Abarca, ingeniera mecánica de la Escuela Superior Politécnica de Chimborazo de Ecuador, emigró a nuestro país con la intención de poder realizar sus estudios de maestría. «Al ser una de las pocas ingenieras mecánicas de mi país, la PUCP me presentó una oferta académica interesante de estudio y trabajo con grupos de investigación», comenta la ingeniera.
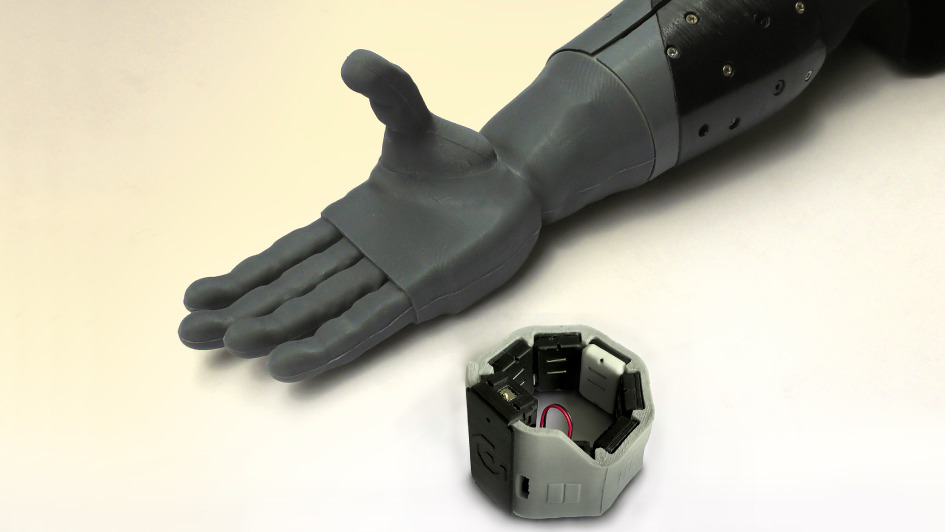
En un inicio, formó parte del proyecto de prótesis transradial. «Pude familiarizarme con los aprendizajes del GIRAB-PUCP, a través de proyectos interdisciplinarios, proyectos de mecatrónica, biomédica, de psicólogos, terapeutas y complementar el conocimiento con un proyecto más grande», precisa Abarca.
Abarca colabora con el GIRAB-PUCP y trabaja en el LIBRA-PUCP, a los que se integró desde 2016 y 2017 respectivamente. Esto le ha permitido desempeñarse como asesora de tesis, investigadora, formuladora de proyectos, gestora de proyectos de prótesis de miembros superiores, asesora de proyectos, como «Caracterización de la respuesta biomecánica de los músculos que más se contraen durante bloqueos en el habla de personas con tartamudez», proyectos de voluntariado con estudiantes de biomédica y mecatrónica, además de su labor docente.

Al ser una de las pocas ingenieras mecánicas de mi país, la PUCP me presentó una oferta académica interesante de estudio y trabajo con grupos de investigación".
Mag. Victoria Abarca
Responsable del Laboratorio de Investigación en Biomecánica y Robótica Aplicada de la PUCP (LIBRA)
Con su actual proyecto de doctorado, quiere realizar un dispositivo que permita reemplazar un miembro inferior. «Mi tesis se refiere a la modelación y simulación mecánica que imita el movimiento de un tobillo protésico. Se vincula directamente a la ingeniería biomédica, mecánica y mecatrónica» comenta finalmente Abarca.
Retos para la implementación
Para lograr el desarrollo de este tipo de proyectos a gran escala, el financiamiento siempre resulta una apuesta mayor. Sin embargo, parte del reto está en interesar a las nuevas generaciones de ingenieros sobre estos temas. «Debemos pensar cómo los jóvenes pueden construir, desde su formación profesional, proyectos que tengan ese enfoque social a partir de sus conocimientos y habilidades adquiridas, y que impacten en la calidad de vida del ser humano», comenta el doctor Elías.
En el caso de las empresas, se espera más disposición al apoyo de estas iniciativas y que apuesten en el trabajo conjunto con la Universidad. Desde el GIRAB-PUCP se realiza investigación científica y desarrollo tecnológico con productos especializados según el requerimiento de organizaciones del sector público y privado.
Los investigadores también se fortalecen en temas de gestión. «El laboratorio y el grupo me ha permitido dirigir proyectos, realizar talleres de capacitación, compartir mis avances en conferencias internacionales, así como mi tema de tesis de maestría sobre la prótesis transradial, que realicé entre los años 2016 y el 2018», precisa la magíster Abarca.
Beneficios del proyecto
El impacto principal de los proyectos está directamente vinculado a los temas de responsabilidad social universitaria. «A partir del trabajo en conjunto con la Dirección Académica de Responsabilidad Social (DARS) de la PUCP, nos vinculamos con la empresa Repsol para que financie 20 prótesis en las zonas de Ventanilla y Mi Perú. El proyecto quedó en pausa por temas de pandemia, pero ya lo estamos reactivando. Estas prótesis se entregarán a personas que poseen un nivel de amputación de mano, por lo general a causa de un accidente», acota el ingeniero Elías.
Finalmente, lo importante de las líneas de investigación de estos proyectos es la generación, desde la Universidad, de condiciones para potenciar las capacidades y que se consoliden las investigaciones en estos campos de estudio con impacto social.
Sobre nuestros investigadores
Dr. Dante Elías Giordano
Ingeniero mecánico de la Pontificia Universidad Católica del Perú (PUCP). Doctor en Ciencias de la Ingeniería con mención en Diseño Mecánico Asistido por Computador, de la Pontificia Universidad Católica de Chile. Profesor e investigador de la PUCP desde 1992. Director de la carrera de Ingeniería Biomédica y de la Maestría en Ingeniería Mecatrónica en la PUCP. Coordinador del Grupo de Investigación en Biomecánica y Robótica Aplicada (GIRAB-PUCP), y jefe del Laboratorio de Investigación en Robótica Aplicada y Biomecánica (LIBRA-PUCP). Premio Nacional Sinacyt a la Innovación 2014 y Premio especial “Inventos con mayor Impacto Social” por parte de NESST Perú en el 2013. Investigador y coordinador de proyectos de investigación, desarrollo e innovación en biomecánica, robótica y análisis de movimiento, con aplicaciones en técnicas y tecnologías para rehabilitación física, discapacidad, rendimiento deportivo, salud y seguridad ocupacional, entrenamiento y entretenimiento.
Mag. Victoria Abarca Pino
Ingeniera mecánica de la Escuela Superior Politécnica de Chimborazo (Espoch – Ecuador). Magíster en Ingeniería Mecánica de la Pontificia Universidad Católica del Perú (PUCP). Candidata a doctora en Ingeniería por la Pontificia Universidad Católica del Perú. Responsable del Laboratorio de Investigación en Biomecánica y Robótica Aplicada de la PUCP (LIBRA), miembro activo del grupo de investigación en Robótica Aplicada y Biomecánica. Experiencia en proyectos de investigación básica, aplicada y desarrollo tecnológico en temas relacionados con la mecánica, biomecánica, robótica aplicada en dispositivos y accesorios de rehabilitación, gestión de la innovación y la tecnología. Docente de la carrera de Ingeniería Biomédica en los cursos de Fundamentos de la Mecánica de los Biomateriales, Laboratorio de Biomecánica y Asesoría de Tesis.