
Algoritmo de clasificación para la locomoción eficiente en múltiples tareas mediante señales inerciales y mioeléctricas con y sin amputación transtibial
-
Antecedentes
En el 2022, el INEI informó que el 24.9% de las personas con discapacidad en Perú enfrenta problemas de movilidad, siendo la amputación de miembro inferior predominante en un 78%. La limitada tecnología protésica disponible afecta la satisfacción de las necesidades, generando problemas de salud y restricciones sociales, impactando negativamente la calidad de vida y movilidad.
-
Objetivos
Este proyecto busca desarrollar, implementar y validar un sistema de control avanzado para un prototipo de articulación robótica de tobillo basado en un mecanismo paralelo, mejorando la adaptabilidad, funcionalidad y comodidad en 5 modos de locomoción, impulsando el avance tecnológico y la accesibilidad de prótesis avanzadas en países en vías de desarrollo.
-
Metodología
-
Resultados esperados
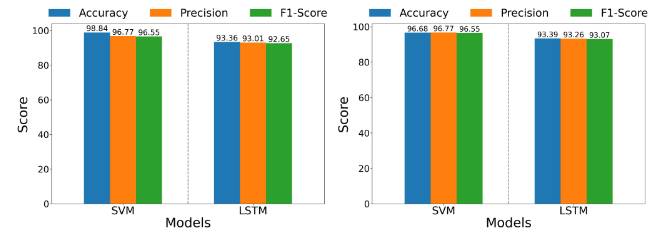
Los resultados de la primera comparación pusieron de manifiesto un rendimiento superior del modelo SVM en la clasificación de tareas en evaluaciones individuales de sujetos con y sin amputación transtibial. Sin embargo, tras aplicar técnicas de adaptación de dominio, las comparaciones posteriores revelaron que el modelo LSTM presenta una mayor robustez y una mejor capacidad de generalización intrapoblacional e interpoblacional. Ambos modelos demostraron tiempos de latencia aceptables, cumpliendo los requisitos de tiempo real establecidos, lo que pone de manifiesto su potencial aplicación en sistemas integrados y entornos de tiempo real.
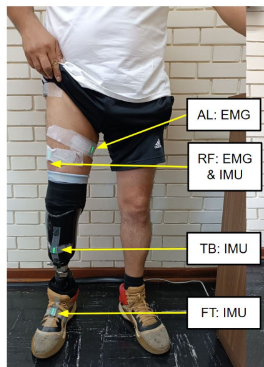
Evaluación del desempeño de modelo para una persona no amputada y amputada
Fecha de inicio: 01/08/2023Fecha final: 21/12/2024
Estado DGI: En proceso
Instituciones Investigadoras:
Pontificia Universidad Católica del Perú
Universidad Nacional San Agustín de Arequipa
Instituciones Financiadoras:
Contrato FGR 2023 “Programa piloto de proyectos de investigación en áreas transversales de excelencia del departamento de Ingeniería”