
Diseño y fabricación de un simulador de marcha, basado en un mecanismo paralelo tipo plataforma, para mejorar el tratamiento y rehabilitación de personas con lesiones motoras en sus miembros inferiores
- Presentación:
Desarrollo del sistema mecánico de un simulador de marcha, del tipo pie plataforma, conformado por dos plataformas Stewart-Gough de accionamiento oleo hidráulico.
Cada plataforma consiste en una base fija unida a una base móvil (plataforma móvil) por seis actuadores lineales, formando un mecanismo paralelo hexápodo de 6 GDL..

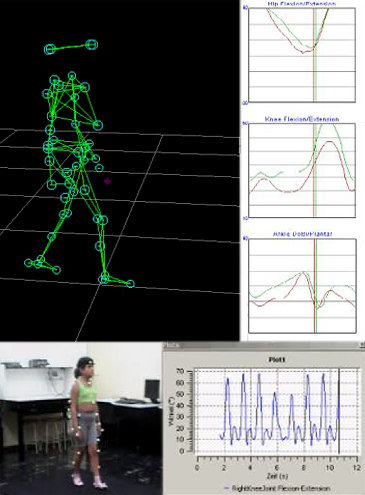
El sistema mecánico controlado, permite simular la trayectoria del pie, así como su cinemática de movimiento, durante la marcha. El modelamiento, simulación y diseño del sistema tuvo como soporte herramientas de software como: AutoCAD, SolidWorks, Cosmos y Matlab. En el modelado analítico de la dinámica se usó el método Newton-Euler y la formulación de Lagrange, así como el Sinmechanics de Matlab.

- Resultados:
En las pruebas de funcionamiento final, el resultado fue avalado por médicos especialistas en medicina física y de rehabilitación, señalando que el simular de marcha desarrollado es eficiente en el proceso de rehabilitación de personas con discapacidad en locomoción.



-
Información
Fecha de inicio: 01/02/2009
Fecha final: 28/02/2011
Estado DGI: Cerrado
Instituciones Investigadoras:
Pontificia Universidad Católica del Perú
Instituciones Financiadoras:
LUCET 90
PUCP 2008