
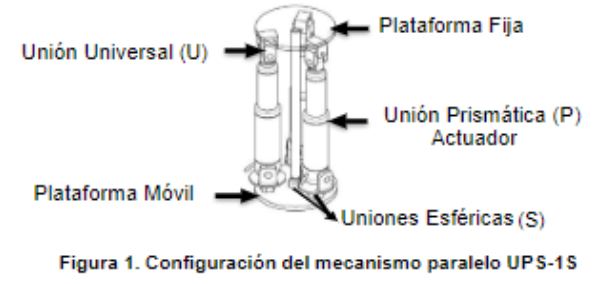
Resumen: The prosthetic ankle design is presented using a parallel UPS-1S type mechanism with the following configuration: universal join, prismatic joint (with a maximum of 2.2 kN force for the linear actuator) and spherical join. This mechanism has 3 active degrees of freedom, with 3 rotation movements similar to a human ankle. It allows 6 movements: plantar flexion, dorsiflexion, eversion, inversion, abduction, and adduction, even the ranges of movements in the sagittal, frontal and transverse planes. This mechanism is developed based on anthropometric measurements of the lower limb of a Mexican woman with 1.56m of height and 64 kg of weight, the proposal of the mechanism has been designed and validated by simulating the ranges of movement of the ankle using Autodesk Inventor 2020.
ABARCA, V. ; GALLARDO, N. ; ELÍAS, D.
Año: 2019
Url: https://zenodo.org/record/4247801