
Design of a non invasive haptic feedback device for transradial myoelectric upper limb prosthesis
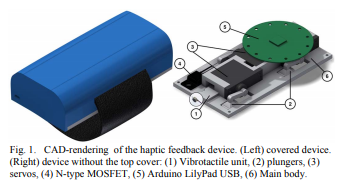
Resumen: This paper presents the design of a new haptic feedback device for transradial myoelectric upper limb prosthesis that allows the amputee person to perceive the sensation of force-gripping and object-sliding. The system designed has three mechanical-actuator units to convey the sensation of force, and one vibrotactile unit to transmit the sensation of object sliding. The device designed will be placed on the user’s amputee forearm. In order to validate the design of the structure, a stress analysis through Finite Element Method (FEM) is conducted.
ROMERO, E.; ELIAS, D.
Año: 2016
Título de la revista: ANDESCON, 2016 IEEE
Ciudad: Arequipa, Peru
Página inicial - Página final: 1-4
Url: http://ieeexplore.ieee.org/document/7836230/