
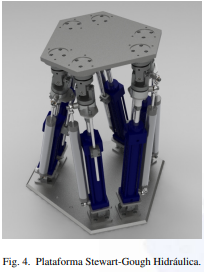
Resumen: El objetivo del proyecto consiste en el control de una plataforma de Stewart-Gough diseñada con seis pistones servocontrolados, plataforma que ha sido desarrollada en la Sección de Ingeniería Mecánica de la Facultad de Ciencias e Ingeniería de la Pontificia Universidad Católica del Perú. El control de posición se logra mediante el uso de dos cámaras implementando algoritmos de visión estereoscópica, los que brindarían en tiempo real la posición exacta de cada uno de los pistones a través de puntos imaginarios en cualquier punto del espacio y proyectados sobre cualquier superficie movible, en este caso la palma de la mano. Cada punto seria ubicado en dicha superficie por lo que el movimiento de estos puntos permitiría el desplazamiento de la plataforma mediante una combinación de las ecuaciones matemáticas que representan la cinemática inversa del mecanismo y la ubicación de las coordenadas espaciales obtenidas a través de unas cámaras, las cuales trabajan con algoritmos de visión usando las librerías OpenCV y el Sistema Operativo Linux como plataforma de trabajo.
El desarrollo de este proyecto abarca todo lo concerniente a sistemas aplicados a simulación, ya sea de vuelo o de navegación manipulada mediante controles no convencionales como son las cámaras de visión estereoscópicas, a diferencia de los mandos convencionales como joysticks o controles por botones, los que poseen mecanismos internos que con el paso del tiempo se desgastan y con el consecuente deterioro de su funcionamiento va decayendo.
Este proyecto aporta al desarrollo de mecanismos coordinados y controlados mediante procesamiento de imágenes, permitiendo la integración de dichos sistemas a mecanismos de control de mayor precisión y de amplia aplicación en simulación.
Bances, E.; Zárate, J.; Rodríguez, J. y Elías, D.
Año: 2010
Título de la revista: XVII International Congress of Electronic, Electrical and Systems Engineering INTERCON 2010
Ciudad: Puno, Perú
Url: https://www.researchgate.net/publication/322926391_Control_de_posicion_de_una_plataforma_Stewart-Gough_servocontrolada_usando_vision_estereoscopica