
 Investigación con Robots Móviles para Limpieza (convenio con KAIST - Korea)
Investigación con Robots Móviles para Limpieza (convenio con KAIST - Korea)Este proyecto de investigación PUCP servirá para: indentificar las diferencias culturales en la adaptación de las personas con robots aspiradora, encontrar información sobre las dimensiones de las diferencias culturales, identificar...
Robot Móvil Jugador de Fútbol Middlesize Robocup 2016
Se presentará una (1) publicación de los resultados experimentales el curso Proyecto de Diseño Mecatrónico (MTR 250) que involucra el diseño electrónico, mecánico y programación de un robot móvil que...
Se presentará una (1) publicación de los resultados experimentales el curso Proyecto de Diseño Mecatrónico (MTR 250) que involucra el diseño electrónico, mecánico y programación de un robot móvil que...
Sistema Mecatrónico para Soldadura y Control de Calidad Automatizado de Piezas en Acero Inoxidable y Fierro Negro para Maquinaria de Industria Alimentaria y Afines
La propuesta de Innovación Tecnológica y/o Productiva es diseñar un sistema mecatrónico de soldadura automatizado que cuenta con un sistema ergonómico con varios grados de libertad que permite desplazamientos lineales...
La propuesta de Innovación Tecnológica y/o Productiva es diseñar un sistema mecatrónico de soldadura automatizado que cuenta con un sistema ergonómico con varios grados de libertad que permite desplazamientos lineales...
 Desarrollo e Implementación de Sistema de Asistencia y Aprendizaje Controlado por Interfaz Cerebro Máquina (BMI) para Personas Discapacitadas
Desarrollo e Implementación de Sistema de Asistencia y Aprendizaje Controlado por Interfaz Cerebro Máquina (BMI) para Personas DiscapacitadasEl presente proyecto propone el desarrollo una sistema de asistencia inteligente controlado por una Interfaz Cerebro-Maquina BMI (Brain Machine Interface) no invasiva que permitirá a las personas con alguna incapacidad...
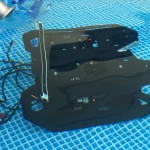 Monitoreo Oceanográfico y Ambiental Mediante Vehículo Submarino Sensorizado Operado Remotamente
Monitoreo Oceanográfico y Ambiental Mediante Vehículo Submarino Sensorizado Operado RemotamenteEl proyecto consiste en el desarrollo de un vehículo submarino robotizado que integre el monitoreo por video, la obtención de datos de ruido submarino y la caracterización de la calidad...
 Camas Médicas Inteligentes para el cuidado de pacientes Hospitalizados con Discapacidad Motriz (JHS Smart Bed)
Camas Médicas Inteligentes para el cuidado de pacientes Hospitalizados con Discapacidad Motriz (JHS Smart Bed)El proyecto consistirá en desarrollar Camas Médicas Inteligentes que mejoren el cuidado de pacientes hospitalizados con discapacidad motriz a nivel nacional. Los resultados finales serán el desarrollo de: 1. Prototipo de...
 Implementación y Desarrollo de un Robot Guía para la Nueva Biblioteca Interactiva PUCP para Interacción Humano-Robot
Implementación y Desarrollo de un Robot Guía para la Nueva Biblioteca Interactiva PUCP para Interacción Humano-RobotSe desarrollará e implementará un robot humanoide guía de biblioteca, el cual se encargará de difundir los servicios con los que cuenta una biblioteca y además realizar dicha labor de...
ROBOTMAN: Plataforma Robotizada Móvil de Telepresencia Orientada a la Vigilancia y Seguridad en Espacios Amplios
El proyecto trata sobre el diseño e implementación de una plataforma robotizada móvil como herramienta de vigilancia y seguridad en espacios amplios. Al finalizar el proyecto se obtendrá un prototipo...
El proyecto trata sobre el diseño e implementación de una plataforma robotizada móvil como herramienta de vigilancia y seguridad en espacios amplios. Al finalizar el proyecto se obtendrá un prototipo...
Vehículo aéreo no tripulado con Sistema de Medición de Calidad de Aire y Radiaciones Ionizantes
El proyecto tiene como objetivo la implementación de un Hexacóptero (Vehículo aéreo no tripulado – UAV) con Sistema de Medición de Calidad de aire y Radiaciones Ionizantes.Diseño y acondicionamiento de...
El proyecto tiene como objetivo la implementación de un Hexacóptero (Vehículo aéreo no tripulado – UAV) con Sistema de Medición de Calidad de aire y Radiaciones Ionizantes.Diseño y acondicionamiento de...